
HENAN DIMA CRANE CO., LTD.

(1).jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
(1).jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
This smart stacker crane is designed for an automatic production line of steel roll; on another hand, this smart systems can connect to Internet of things, such as ERP, MWS, SAP, etc.
Background
Smart era comes, smart cranes also.After three years of research and development, intelligent crane is now already comes up. This crane is of top advanced Smart control system, which can reaslize the various intelligent functions, such as, Full automation of unmanned operation, Smart safety monitoring, Anti-swaying, Speed extending, Inching, Automatic positioning, smart load-floating, Shock prevention, Synchronization, Anti Rope-slacking protection, etc
Unmanned Overhead Crane Control System
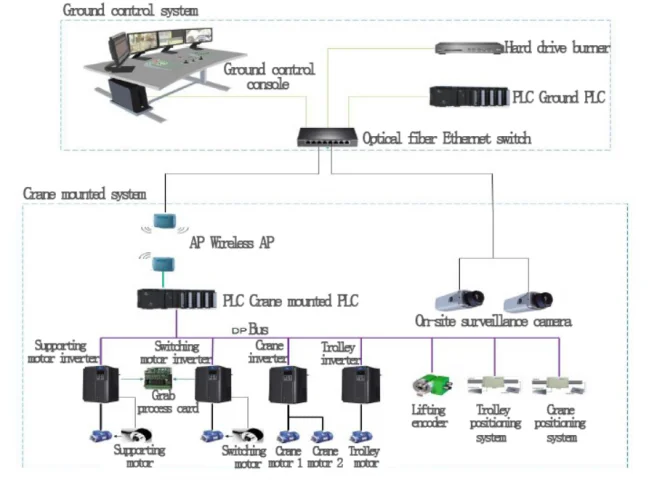
The full-automatic unmanned overhead crane system mainly includes a ground central control system and an overhead crane system. The ground central control system includes the ground management server, ground control system, remote control system, HMI, safety control system, wired and wireless network, video monitoring system, etc. The overhead crane system includes the crane mounted PLC, overhead crane positioning device, remote control receiver, wireless network receiving device and overhead crane electric control PLC.
The implementation of an unmanned overhead crane system requires at least the following hardware devices:
Ø Position sensors in the three dimensions of X/Y/Z, with accuracy within +/- 1cm.
Ø Sensor series on clamps (anti-clamping, anti-collision, opening and closing, aligning, etc.)
Ø Encoder to control clamp rotation (if required)
Ø Anti-swing device to avoid swinging of steel wire rope when lifting materials
Ø Weight sensor
Ø Drive system with inverter
Ø Independent anti-collision system, directly connected with inverter
Ø Fast and stable data transmission system
Hardware devices to improve system performance (Optional):
Ø Optical identification system for accurate detection of material size and position
Ø Equipment monitoring system
Ø Incoming/outgoing vehicle identification system
Topological diagram of overhead crane control system
The client software is used to operate and monitor the daily operation of the warehouse management system, including the following functions:
Ø Graphical display interface
Ø Displaying details of materials
Ø Statistical report of stocks
Ø Storage history of materials
Ø Registration management of transportation vehicles in the warehouse area
Ø Management of operation instructions
The toolbar at the top of the interface is convenient for users to switch various functions, including vehicle management, operation instruction management, operation mode switching, etc.

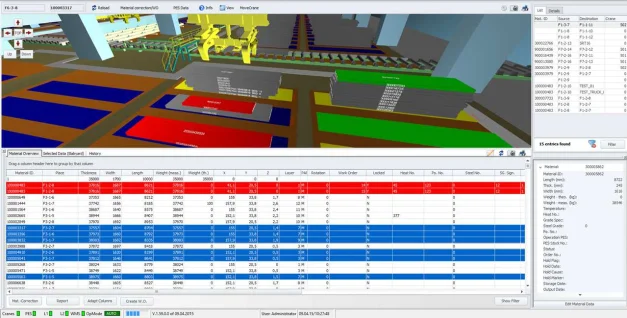
The main window shows the status of the warehouse area, and the user can operate in the main window to directly send operation instructions to the designated overhead crane. The window at the bottom of the interface can display the detailed information of the selected materials, the loading plan of production, customer orders, etc.
1. The absolute address information detected through the absolute coded scale position detection is true and reliable, without error code and accumulation error. The absolute coded scale adopts non-contact working mode.
2. Through Gray bus position detection, it can continuously and accurately detect the absolute address within the traveling range of the overhead crane with a detection accuracy of 5mm, which can completely meet the requirement of accurate positioning of the overhead crane.
3. In the position detection through laser ranging, the process from the laser transmitter transmits laser pulses to the reflecting plate to the reflected light is received will be timed, and then the distance between the laser and the target can be calculated.

There are a variety of technical means to detect the position of the overhead crane in running. For a specific project, the positioning technology adopted depends on the actual situation of the warehouse area, such as the working environment, the size of the warehouse area, the number and layout of overhead crane, etc.
For the Z-direction position detection of the overhead crane, it usually adopts the following methods:
For distance measurement in the vertical direction, an encoder can be installed on the hoisting machine, and the encoder will send the position to PLC through communication.

In the unmanned overhead crane system, the encoder is not only used to obtain vertical data. When the overhead crane is lifting materials on moving equipment (walking beam, roller table, etc.), the moving equipment can be locked/unlocked according to the height data detected by the encoder, thus avoiding accidents caused by sudden movement of the equipment during the lifting of materials. Moreover, the unmanned overhead crane system automatically starts traveling in the horizontal direction after judging that the material is lifted to a certain height according to encoder data.











.jpg)